สร้างรถหุ่นยนต์ 2WD ควบคุมผ่าน Bluetooth HC-06 ด้วย Arduino
โปรเจคนี้จะพาคุณสร้างรถหุ่นยนต์ 2 ล้อ (2WD Robot) ที่สามารถควบคุมผ่านสมาร์ตโฟน
ด้วยระบบ Bluetooth โดยใช้ Arduino UNO เป็นตัวควบคุมหลัก
เหมาะสำหรับผู้เริ่มต้นที่ต้องการเรียนรู้ด้าน Robotics, การควบคุมมอเตอร์
และการสื่อสารแบบไร้สาย
อุปกรณ์ที่ใช้ (Devices & Components)
- Arduino Uno R3 https://shopee.co.th/product/243007968/5725582932
- Bluetooth Module HC-06 https://shopee.co.th/product/243007968/6625582852
- L298N Motor Driver https://shopee.co.th/product/243007968/5325584382
- ชุดถ่าน (Battery Holder) https://shopee.co.th/product/243007968/7425582959
- มอเตอร์ DC แบบมีเกียร์ 2 ตัว (2WD) https://shopee.co.th/product/243007968/7946217871
คุณสมบัติของโปรเจค
- รถหุ่นยนต์ 2 ล้อ (2WD)
- ควบคุมผ่าน Bluetooth
- ใช้ Arduino เป็นสมองหลัก
- ควบคุมมอเตอร์ผ่าน L298N
- สามารถต่อยอดได้ง่าย
ขั้นตอนที่ 1: ประกอบโครงรถ
- ติดตั้งมอเตอร์เข้ากับโครงรถ
- ติดตั้งล้อและล้ออิสระ (caster wheel)
- ยึด Arduino และ L298N ให้แน่น
- จัดสายไฟให้เรียบร้อย
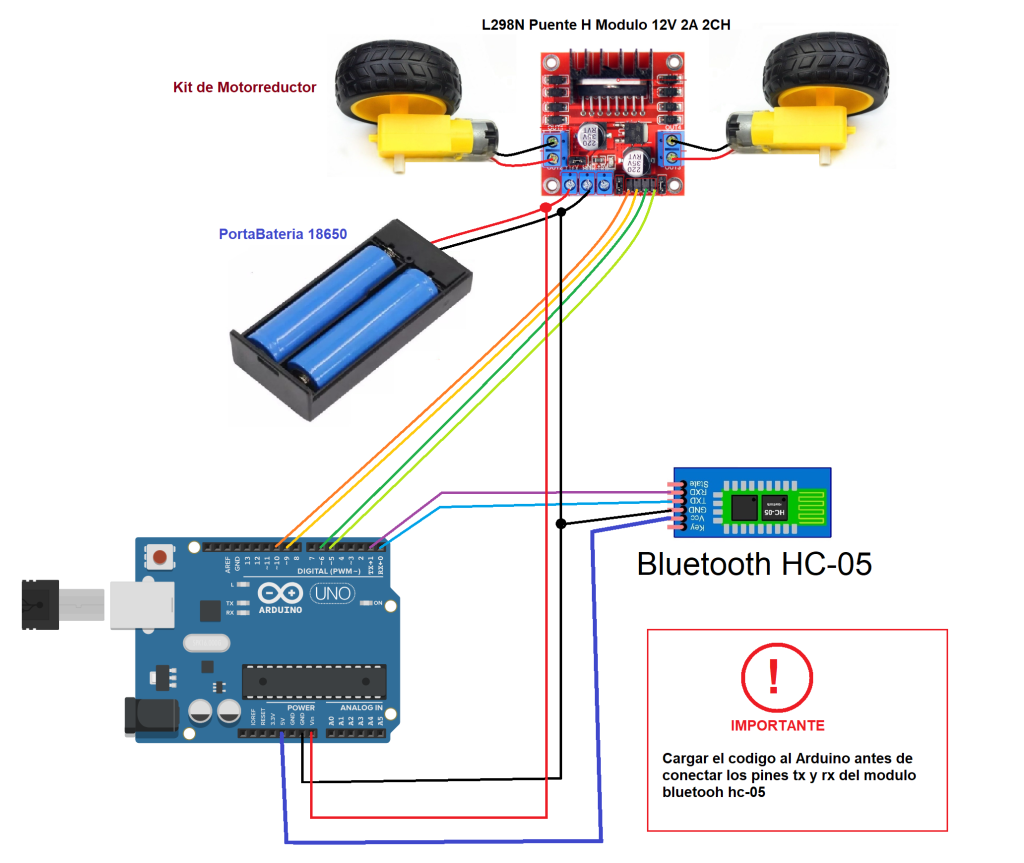
ขั้นตอนที่ 2: การต่อวงจร
มอเตอร์ → L298N
- มอเตอร์ขวา → OUT1, OUT2
- มอเตอร์ซ้าย → OUT3, OUT4
- VCC → แบตเตอรี่ (7–12V)
- GND → ต่อร่วมกับ Arduino
Arduino → L298N
- Pin 5 → IN1
- Pin 6 → IN2
- Pin 9 → IN3
- Pin 10 → IN4
Bluetooth HC-06
- VCC → 5V
- GND → GND
- TX → RX (Pin 0)
- RX → TX (Pin 1)
หมายเหตุ: ควรถอดสาย TX/RX ก่อนอัปโหลดโค้ด
ขั้นตอนที่ 3: อัปโหลดโค้ด
- เลือกบอร์ด Arduino Uno
- เลือก COM Port ให้ถูกต้อง
- อัปโหลดโค้ด
- ต่อ Bluetooth กลับหลังอัปโหลดเสร็จ
ขั้นตอนที่ 4: ควบคุมผ่านสมาร์ตโฟน
ดาวน์โหลดแอปควบคุม Bluetooth:
- จับคู่ HC-05 (รหัส 1234 หรือ 0000)
- ส่งคำสั่ง:
- F = เดินหน้า
- G = ถอยหลัง
- L = เลี้ยวซ้าย
- R = เลี้ยวขวา
- S = หยุด
โค้ดโปรแกรม Arduino
String codigo = "";
// MOTOR 1
const int M1A=5;
const int M1B=6;
// MOTOR 2
const int M2A=9;
const int M2B=10;
// ความเร็ว
int vel=128;
void setup() {
Serial.begin(9600);
pinMode(M1A,OUTPUT);
pinMode(M1B,OUTPUT);
pinMode(M2A,OUTPUT);
pinMode(M2B,OUTPUT);
analogWrite(M1A,0);
analogWrite(M1B,0);
analogWrite(M2A,0);
analogWrite(M2B,0);
}
void loop() {
if (Serial.available() > 0) {
char caracter = Serial.read();
if (caracter != '\n') {
codigo += caracter;
} else {
char inicial= codigo.charAt(0);
switch (inicial) {
case 'F': adelante(); break;
case 'G': atras(); break;
case 'R': derecha(); break;
case 'L': izquierda(); break;
case 'S': detener(); break;
case '#':
String numero = codigo.substring(1);
vel = numero.toInt();
break;
}
codigo = "";
}
}
}
void adelante(){
analogWrite(M1A,vel);
analogWrite(M1B,0);
analogWrite(M2A,vel);
analogWrite(M2B,0);
}
void atras(){
analogWrite(M1A,0);
analogWrite(M1B,vel);
analogWrite(M2A,0);
analogWrite(M2B,vel);
}
void derecha(){
analogWrite(M1A,vel);
analogWrite(M1B,0);
analogWrite(M2A,0);
analogWrite(M2B,vel);
}
void izquierda(){
analogWrite(M1A,0);
analogWrite(M1B,vel);
analogWrite(M2A,vel);
analogWrite(M2B,0);
}
void detener(){
analogWrite(M1A,0);
analogWrite(M1B,0);
analogWrite(M2A,0);
analogWrite(M2B,0);
}
วิดีโอสาธิตการทำงาน
สรุป
โปรเจคนี้ช่วยให้คุณเข้าใจพื้นฐานของการสร้างหุ่นยนต์เคลื่อนที่
และการควบคุมผ่าน Bluetooth
สามารถนำไปต่อยอดได้ เช่น:
- เพิ่มเซ็นเซอร์หลบสิ่งกีดขวาง
- ควบคุมผ่าน WiFi
- เพิ่มกล้อง (Smart Robot)
เริ่มจากรถ 2WD ธรรมดา แล้วต่อยอดเป็นหุ่นยนต์อัจฉริยะได้ง่าย ๆ